カム機構は主として位置決め機構として用いられます。カム機構の最も基本的な構成要素は①カム、②節触子および③従節です。
最終の動作を取り出す出力端までの間に介在するリンク機構や、運動を拘束するためのばねなどを含んだ広義のカム機構を定義することもあります。
カム機構
サイン形
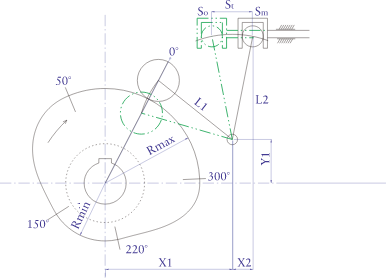
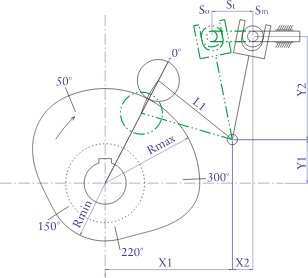
リンク形

タンジェント形
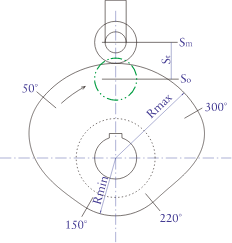
直動形
ラジアン形
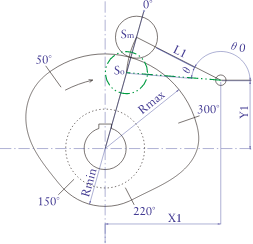
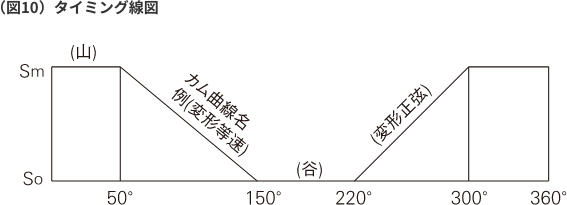
機構図への記入項目
- Rmax、Rmin、θ0、θストロークのいずれか2つ。直動径では、Rmax、Rmin、ストロークのいずれか2つ。
- タイミング・カム曲線の種類
- ローラー径
- 回転方向
- 0゜のキーまたは割りの位置
- ボスの向き
- L1、L2、L3 X1、X2、 Y1、Y2